
Model Rocket Dataloggers
9/25/2021
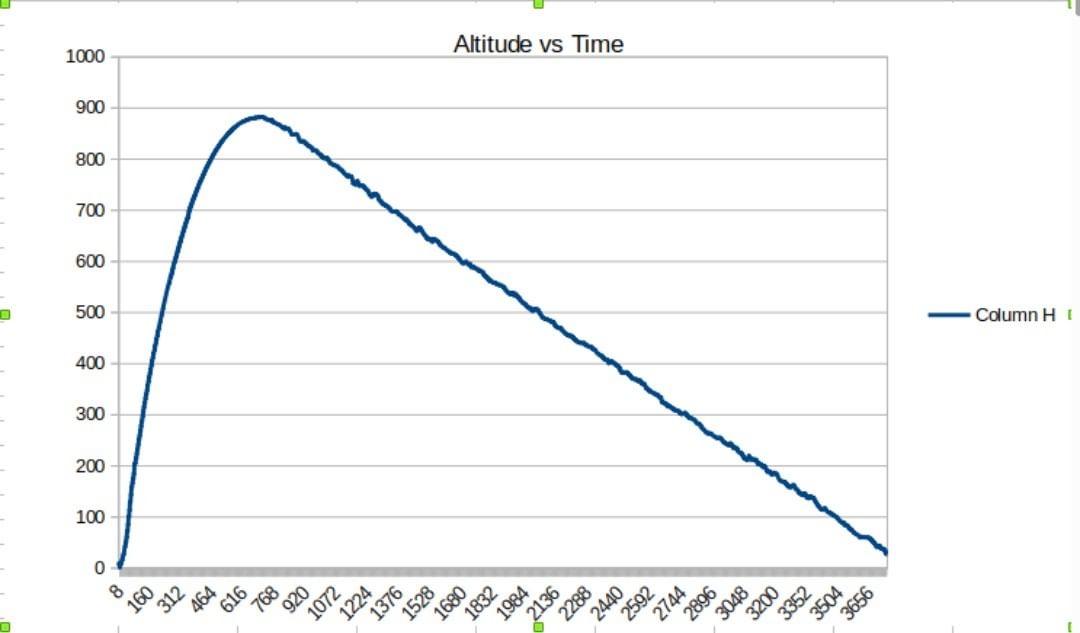
As per the note on the M4 board, I have flown this board several times and gotten a record altitude with the board. I am posting the altitude chart below:
Update 3/4/2021
In a flight in January, I was able to fly my custom datalogger to 1000 feet. I built a customized version of the Estes Big Daddy for this type of flight. The Big Daddy has a very capacious nosecone. For the purpose of this mission, the body tube is also quite large diameter, allowing for the modification to convert the rocket to a cluster type system.
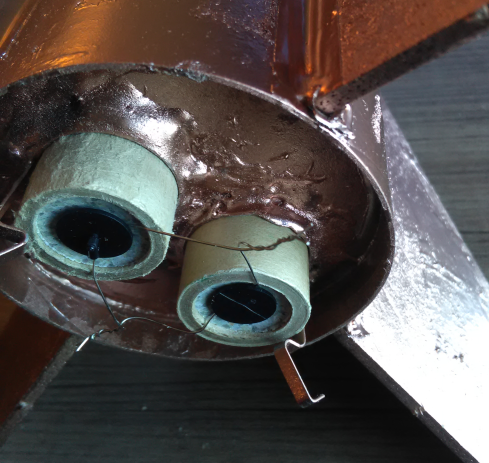
As you can see from the image above, the diameter is sufficient to allow for the placement of two tubes able to hold the larger Estes E size engines or the D engines with the yellow adapter tubes. There is enough space that the two engines do not touch each other.
And below you see Big Daddy 2x on the pad before launch.

As with the smaller rockets, I cut the plastic nosecone open and packed the logger inside. I used pieces of styofoam to make sure the payload was secure. With two E engines (E12-6) the rocket took off fairly slowly, had some good flames, and rose to a record altitude. After recover, analysis of the data from the recorder indicated an altitude of over 1000 feet as shown below.

Updated 01/01/2021
A number of test articles for the Marsyard balloon and associated projects are in various stages of construction and testing. Below I will describe a few of the more interesting items.
First is the model rocket flight data logging board. This board, and the immediate predecessors, have flown well over a dozen missions during the last couple of years. There are four components to this system. The first is the Adafruit Adalogger. More details on this board can be found elsewhere on the site or on the Adafruit site. This board is fastened to a piece of perfboard as shown below:
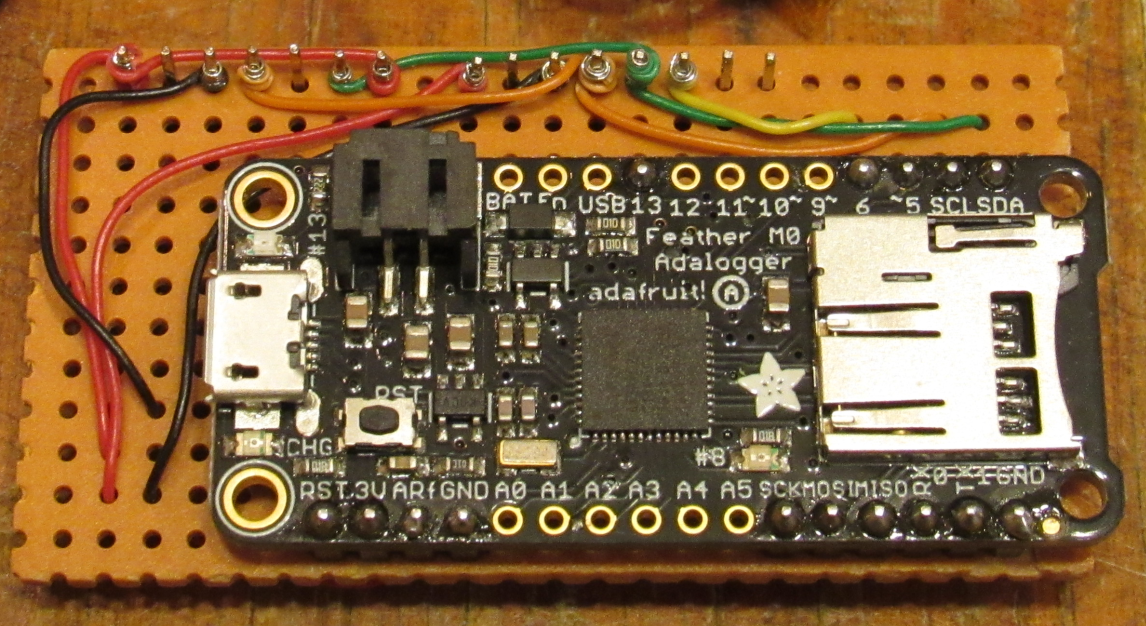
To reduce the weight of the board, I use the headers only for pins that I actually use on the system (like I2C, SPI, power). Note the colored wires here. I bought these color wire wrap wires off Amazon and they sure do help with wiring and debugging.
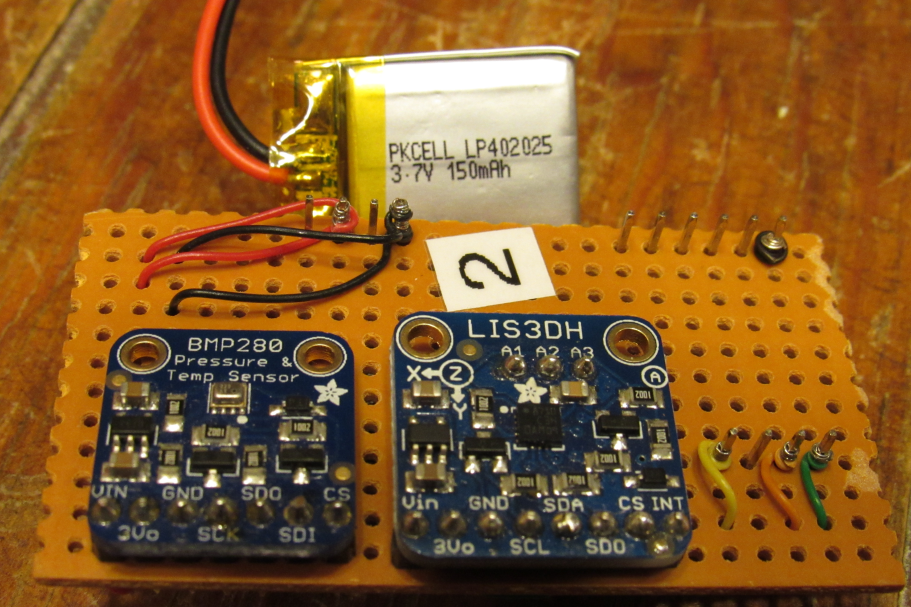
The back side of the board has the sensors facing out. You can see the pins from the back side sensors poking through the board along the top here. I wire the sensors and feed the wires through to the back side.
Here is the back side. You can see the BMP280 and LIS3DH here. The 280 is easy to work with and reasonably accurate. For high accuracy altimeter use it is probably necessary to use real physics equations rather than the approximation from the altitude library function. The LIS3DH gives acceleration values from an inexpensive and easy to use sensor. These two sensors are all that I need for checking basic rocket behavior, and have helped me learn a lot of what is needed for a Mars Balloon.
Here is a shot of the instruments inside the nosecone of a smaller diameter black powder rocket. After the battery is connected, the nose cone is buttoned up and electrical tape is used to fasten the nosecone closed.

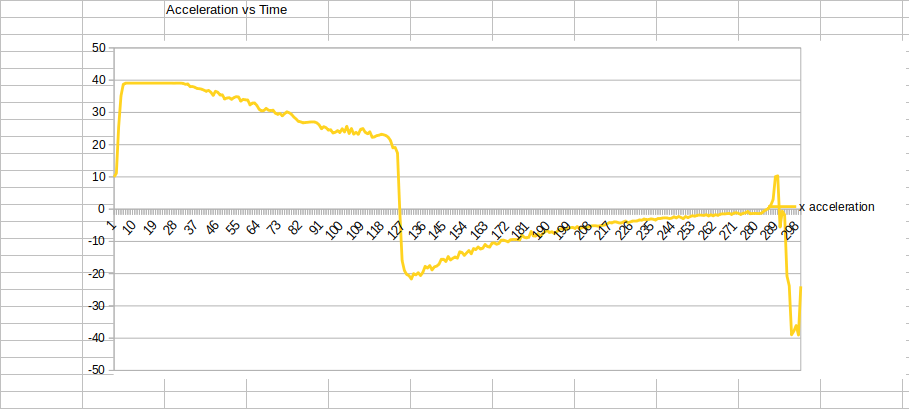
The software that I have written is adapted from several sources, much is due to Adafruit. Thanks guys! The program is in about the 3rd generation now, and has been modularized pretty well. Debug output is sent when a flag is set, and is helpful for bench testing. Flight data is written to files (one per launch) on the micro-SD card. After the flights I can pull the data off as csv files, and process the numbers. After processing I can use Open Office to generate neat plots like these below, to show the flight altitude readings and acceleration curves.

I did not reach 1000 in this flight, but hope to soon with the Estes High Flier XL rocket.
There are currently two models of this board that I can use with most of my rockets. Note to readers, check your nosecone dimensions before purchase and avoid rockets with small cones unless you want to put the instruments in the body tube. For bigger rockets this might be ok but for the smaller Estes I put the instruments in the nosecones.
For my December 2020 launches I used my Estes High Flier XL and Estes Olympus rockets. These are single engine, single stage rockets that will take up to an E engine. Below are a couple of stills from video I shot from a mandated safe distance from the pad.


In upcoming launches I hope to use a two engine Big Daddy from Estes that I have built, and a two stage Estes Loadstar. The Big Daddy has a wonderful big nosecone that has room for a large payload, and with two E engines should be able to get close to 1000 feet. The Loadstar is smaller, but has a payload bay and with with two C engines should allow for a good altitude.