
nRF52840 Sense Feather from Adafruit
12/22/2021
Earlier this year, I launched my sense board with a wired up micro-SD board using my Estes Big Daddy 2 engine cluster rocket. The board had tested out fine on the ground. The Big Daddy with the 2 engine cluster has flown several times over 1000 feet, which is pretty good for a rocket that heavy. The large nose cone provided ample space for payload including batteries.
Unfortunately, I altered the orientation of the launch rod at the launch (September) to avoid dropping the Big Daddy onto the soccer players. This resulted in the Big Daddy getting caught in the wind and blowing to a more remote field. My recovery team and I search diligently twice but never found the rocket. The reward sticker fell off the rocket and though I had printed a new sticker and brought it along it had not been added before this flight. So, RIP for the sense board and the rocket.
This was a great board and I hope to be able to get another one to work with soon.
1/2/2021
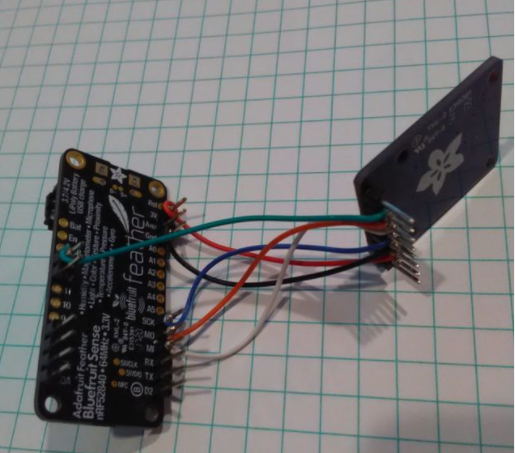
I have loaded a derivative of my datalogger software that I developed for the Adafruit Adalogger on this chip. Because the flash is pretty small, only 2Mb, I set this board up to record the data to the SPI flash for just a single flight. With an external switch, the board can then be put into a mode where it dumps out the data onto the console port, or clears the contents of the flash.
I have flown this board a couple of times. The small size and weight makes it a good choice for small nosecones (like the Estes Goblin, rated to 1400 feet with no payload) and attempts to reach greater heights. I plan to make a few changes to the software build to use the onboard switch.
Longer range plans could include the ability to talk to the device using the onboard blue tooth, and send data to a cell phone or tablet. This is a much greater reach for me right now, but could be done if I can find example code.
7/20/2020
This board combines the processor from the nRF52840 with some common sensors. This is handy for me, as it combines the chip with a bmp280 (which I use for barometric pressure and altitude readings) and 9DoF motion detector.
In theory, this means that with just an added battery I can gather data from the rocket launch, save to the flash chip, and then read off from the laptop. Using this board means a reduction in mass for the instrument package of about 60%, which means more altitude. Pretty cool.
So far I have been able to read data from the bmp280 and the 9DoF sensor. The temperature sensor on the STM parts seems wonky but that could just be me. The bmp280 readings are consistent with those of another bmp280 taken at the same time.
On Mars this sensor could be deployed on a boom or the side of the payload and then send the data in via serial or bluetooth.
Here is the board:
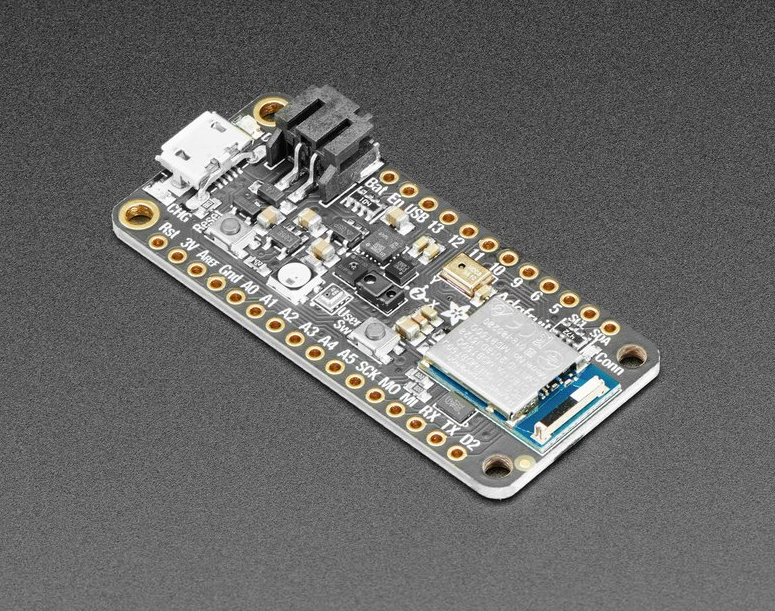
Here are the features of the board:
- ARM Cortex M4F (with HW floating point acceleration) running at 64MHz
- 1MB flash and 256KB SRAM
- Native Open Source USB stack – pre-programmed with UF2 bootloader
- Bluetooth Low Energy compatible 2.4GHz radio (Details available in the nRF52840 product specification)
- FCC / IC / TELEC certified module
- Up to +8dBm output power
- 21 GPIO, 6 x 12-bit ADC pins, up to 12 PWM outputs (3 PWM modules with 4 outputs each)
- Pin #13 red LED for general purpose blinking, Blue LED for general purpose connection status, NeoPixel for colorful feedback
- Power/enable pin
- Measures 2.0″ x 0.9″ x 0.28″ (51mm x 23mm x 7.2mm) without headers soldered in
- Light as a (large?) feather – 6 grams
- 4 mounting holes
- Reset button
- SWD debug pads on bottom of PCB
The sensors are: