
Raspberry Pi Zero
12/22/2021
The Pi Zero is a really mixed bag. On the one hand, it is a great little standalone computer. But the lack of networking really limits it in the IOT space. For embedded use, the lack of networking means that you need to connect via a serial cable or use a hub and a mess of cables for USB. Not very practical and not good for my balloon or rocket work.
Not long after the original zero, Pi Foundation came out with the Zero W. This is an enhanced board with added wireless networking. This is a great addition as now it is possible to ssh into the board and run commands without messy cables. I have several of these boards. The wifi seems to be pretty limited in range because of the on board antenna and low power. But it does work to some degree and makes access way easier. The big limit for me still is the single USB port. If I want to connect more devices (like webcams), or a hard wired ethernet, an external usb hub is needed. With a sense board, this unit is probably good enough for the balloon camera as files can be pulled off via the network connection.
The addition of the radio does potentially cause problems with some add on hats, as pogo pins can cause interference with the onboard radio. I have had this problem. In this case, ferrite rings may help or the serial cable may be needed.
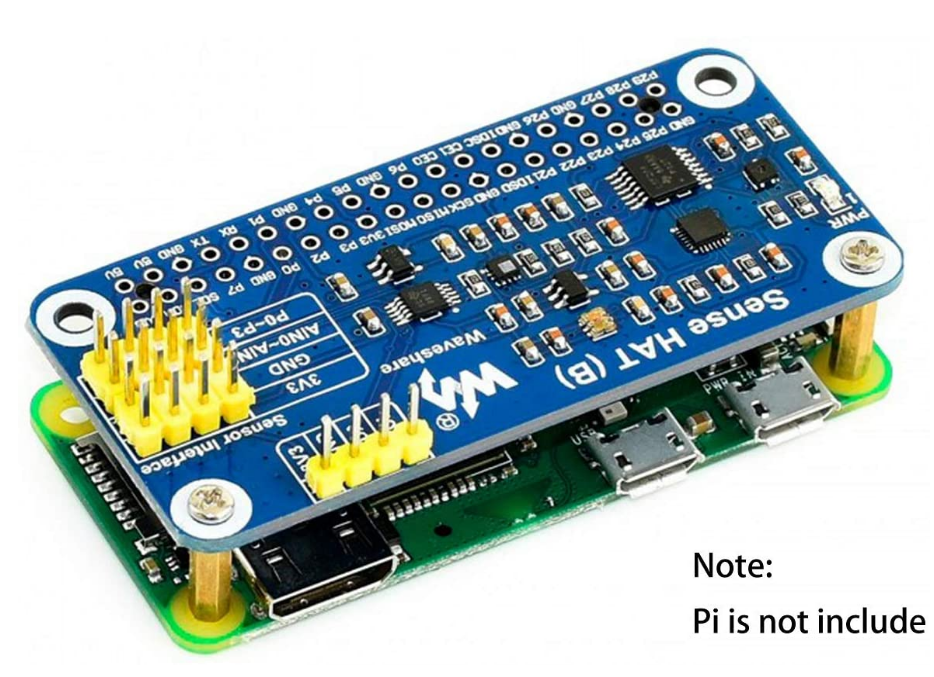
One cool addition to the zero line is the Waveshare sense hat. I have one of these and got some data off it via python code. It does cause problems because the board uses the pogo pins. I may end up running hard wires off the zero board rather than use the pins if I cannot get them shielded. The waveshare board is kind of expensive but has a lot of goodies on it.
Initial post:
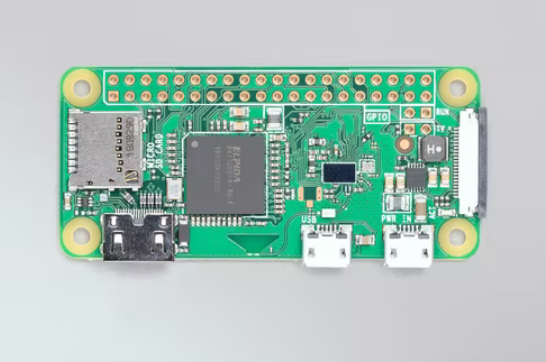
The recently released Raspberry Pi Zero provides a lot of function for the gram. In the case of the Zero, the mass is about 9 grams. For that small mass, the board provides 512Mb of RAM, a Broadcom BCM2835 processor, 2 USB ports, 40 GPIO pins (sans socket), and the camera port (CSI).

The CSI port is the critical element here, as it allows the Zero to control the standard Pi cameras. The original camera was 5 megapixels, and the new one is 8 megapixels. Note the Zero side of the camera cable is different than the standard Pi, so a special adapter cable is needed.
Already, the Zero has been used for projects such as wearable digital cameras (Pi Zero Camera).
The Zero is stated to cost only $5, but this cost is misleading. Because the USB and HDMI ports are small size, adapters are needed. The best bet here is to buy a kit that includes all the adapters, at least for the first machine purchased.
The Zero has only the two USB ports, one of which is used for power (the kit includes a power supply). This leaves only one meager port for keyboard and mouse. To address this, a hub is needed, and depending on what kind of setup the user wants, the hub may need to be powered. Networking is also problematic, though wireless or wired should be able to run through the hub (I have not tested this however.)
For the purpose of the Mars Aerobot, the Zero would make a good camera. It is small, light, programmable in a variety of languages (C/C++ and python being the natural choices), cheap, and takes much less power than the Pi 3. The power consumption can also be reduced by turning off the HDMI interface and programming the unit via the console (need special cable for this). The 80ma value is higher than I would like but if the camera is only on during the day hours, having the solar panels on will be helpful.
I hope to get the camera function sorted out soon. The camera will be interfaced with the Pic Fubarino SD via a combination of serial ports and GPIO pins. Images will be stored on the Zero, and when the satellite uplink window opens, the Zero will run the code to upload the files to the satellite (MRO etc).